I am a Master of Management student at UBC, after a BSc in Biology and Computer Science (Combined Major).
I currently work on humanoid locomotion, training high-level controllers to take robust steps in challenging environments, with Dr. Michiel Van de Panne at UBC and Nick Ioannidis (PhD, SFU). Accepted to Canadian AI/CRV 2026 (Nectar track, Exploration Edge).
My undergraduate thesis, supervised by Dr. Daniel Coombs, used reinforcement learning to model human behaviour during epidemics. Published at TMLR 2026 and a spotlight at Canadian AI/CRV 2026 (paper).
I am interested in reinforcement learning, vision-action-language models and computer vision: building systems that tightly couple perception and action.

Research
Exploring the intersection of artificial intelligence, robotics, and human behavior through computational approaches. My research focuses on developing adaptive systems that can learn, reason, and interact effectively in complex environments.

Infra-Bayesian Reinforcement Learning Agents Outperform Classical RL For Worst-Case Robustness
Supervised Program for Alignment Research (SPAR)
An infra-Bayesian reinforcement learning agent that tracks a set of plausible world models instead of a single posterior, and selects actions by their worst-case expected value across that set.
Imitation-Free Diffusion Policy Training for Humanoid Footstep Planning
MOCCA Lab, UBC Computer Science · Dr. Michiel Van de Panne
Developed robust control policies for humanoid robots to navigate challenging terrains using deep reinforcement learning techniques.
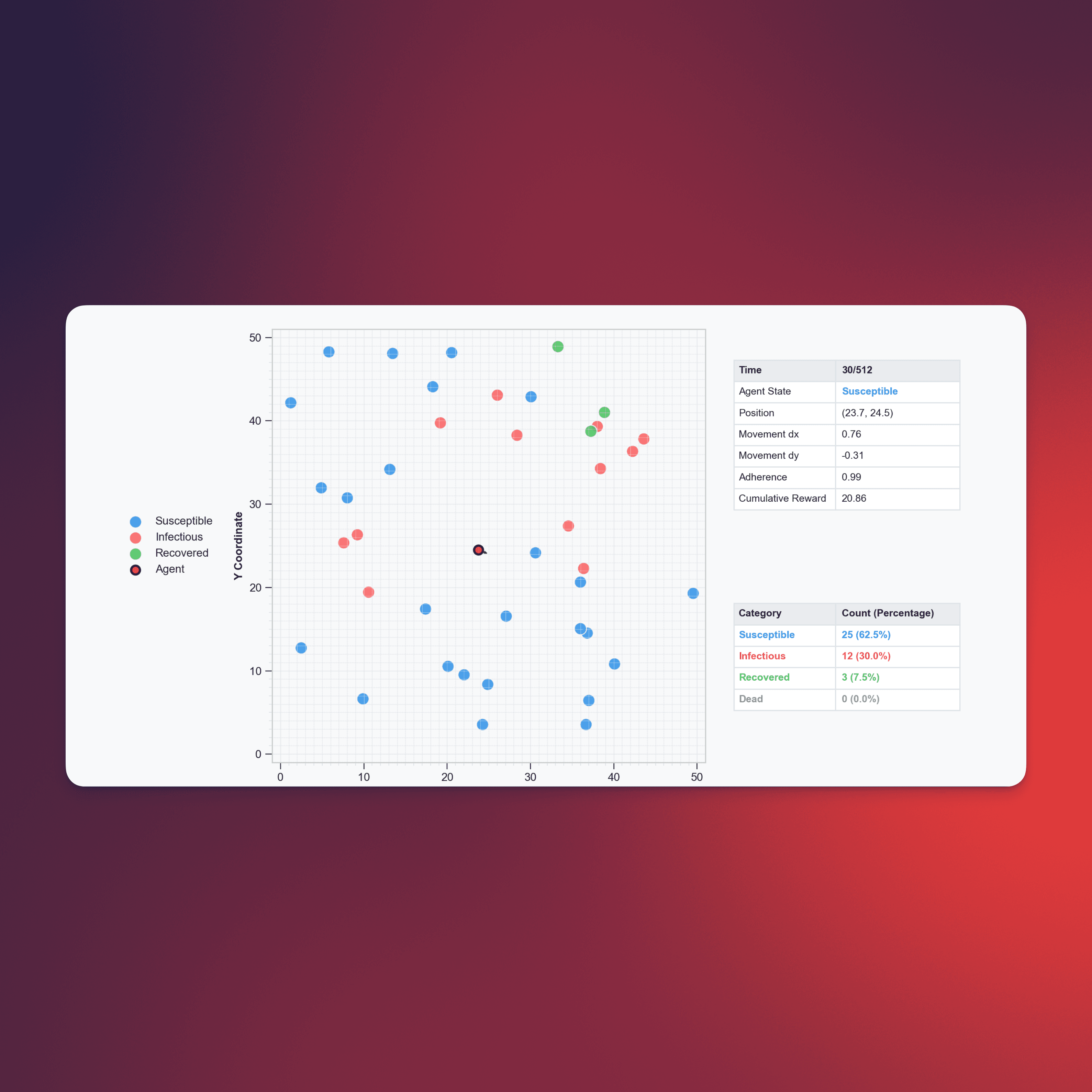
ContagionRL: A Flexible Platform for Learning in Different Spatial Epidemic Environments
UBC Mathematics & Computer Science · Dr. Daniel Coombs
ContagionRL simulates human behavioral responses during epidemics using reinforcement learning, combining a spatial SIRS disease model with single-agent RL.

Entrepreneurship Education Research
UBC Computer Science and Sauder School of Business · Dr. Angele Beausoleil
An NLP-based system that automatically analyzes and maps entrepreneurship education programs and course syllabi against defined competency frameworks using zero-shot classification.
PILOT: Platformed Inteins: A linked orthogonal toolkit
UBC Life Sciences Institute (LSI) · Dr. Steven Halem
A modular intein-mediated cell-free protein synthesis platform with a self-aggregating solubility tag, enabling multisubunit peptide assembly and traceless purification in a Vibrio natriegens lysate.
Featured Projects
A selection of projects combining AI, software engineering, and data-driven systems: from interactive dashboards and research prototypes to robust web and mobile applications.

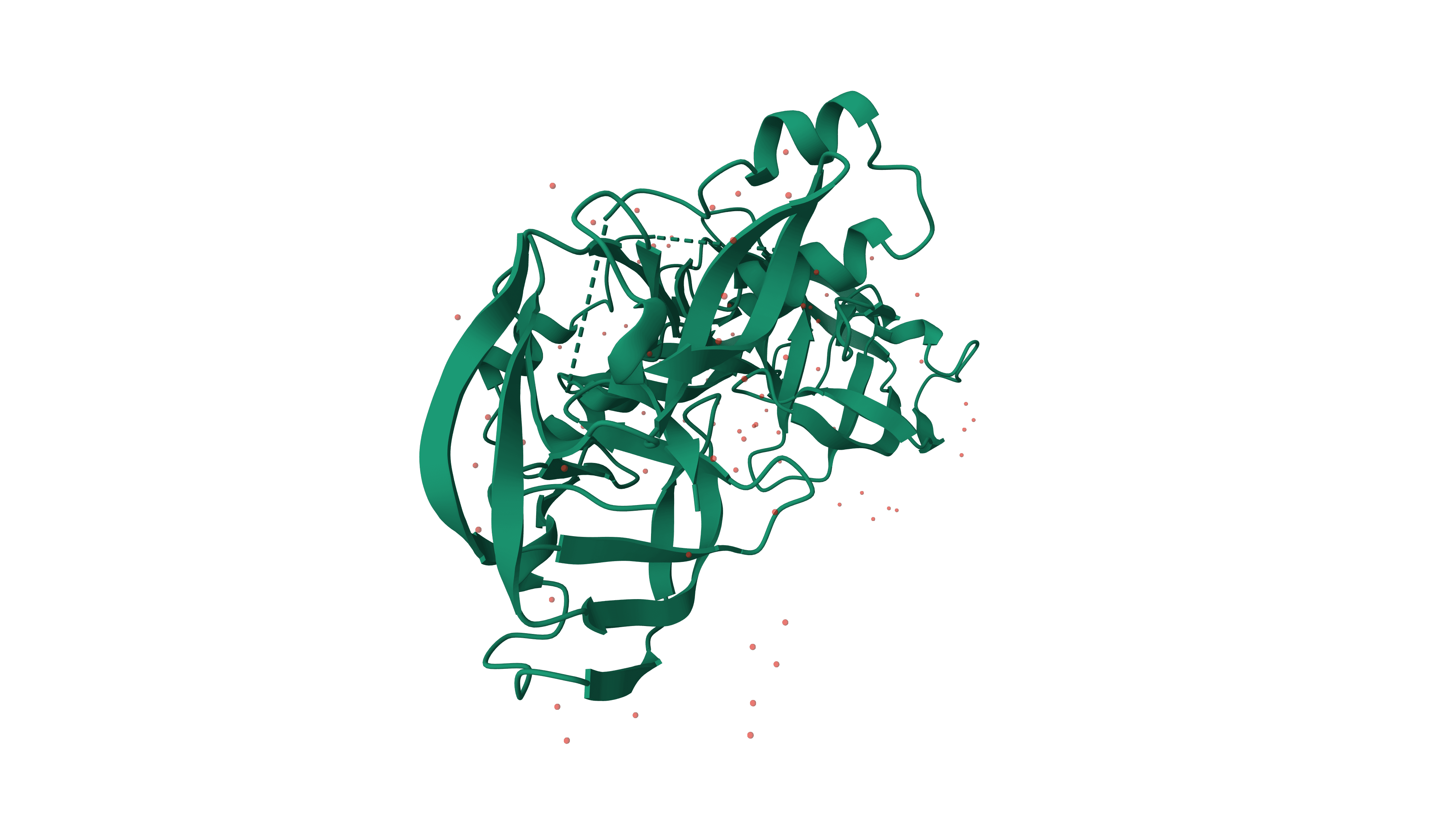
Protein Mutation Analysis
Systematic single-amino-acid mutation scan across an entire protein chain.
Autonomous Landing with Deep RL
DQN agent that learns to land a spacecraft from scratch.
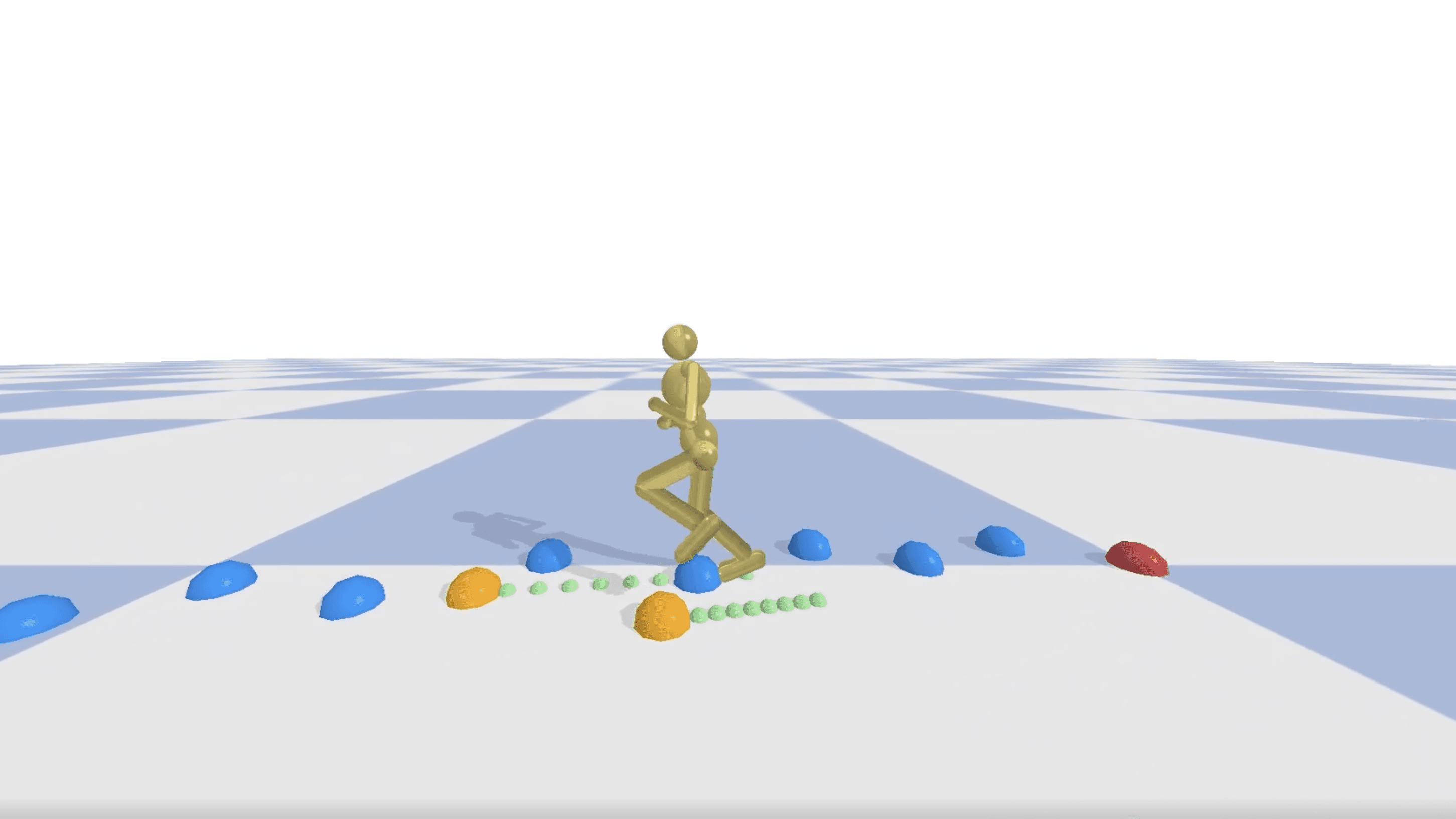
MuJoCo: Learning to Stand
Teaching a humanoid to stand from scratch with PPO and MuJoCo physics.

Monte Carlo Protein Enhancer
Tens of billions of Monte Carlo simulations on UBC's Sockeye HPC cluster, optimizing protein conformations.

Custom Testnet Trading System
Java paper-trading simulator with a Swing GUI and random-walk price model.
Blog
When Models Fail Strategically
A field reference for frontier AI safety: how alignment breaks, what a misaligned agent does, how we look inside it and how we argue it is safe to ship.
Keeping Things on Track: How PID Controllers Work
Three ideas, three terms, a formula you could write in a single line. How PID controllers solve one of the most universal problems in engineering.
Kelly in the Wild: Against the Ensemble
How Kelly sizing, LMSR pricing and real-time Bayesian updating fit together into a working prediction market architecture.
GitHub Activity
Connect
Feel free to contact me at rdmnr@protonmail.com